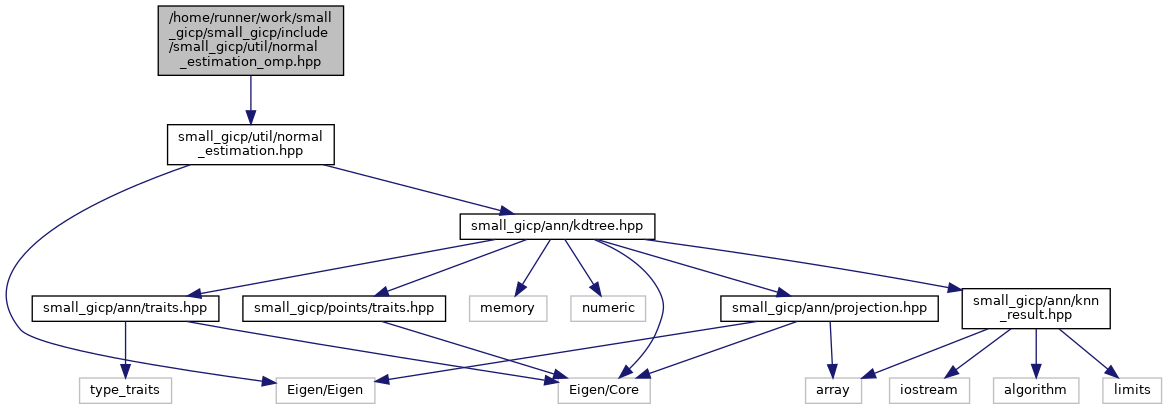
#include <small_gicp/util/normal_estimation.hpp>
Include dependency graph for normal_estimation_omp.hpp:
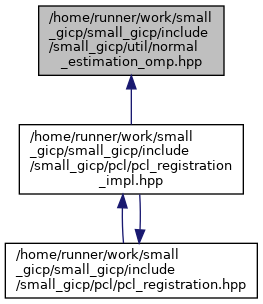
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| small_gicp | |
Functions | |
| template<typename Setter , typename PointCloud > | |
| void | small_gicp::estimate_local_features_omp (PointCloud &cloud, int num_neighbors, int num_threads) |
| template<typename Setter , typename PointCloud , typename KdTree > | |
| void | small_gicp::estimate_local_features_omp (PointCloud &cloud, KdTree &kdtree, int num_neighbors, int num_threads) |
| template<typename PointCloud > | |
| void | small_gicp::estimate_normals_omp (PointCloud &cloud, int num_neighbors=20, int num_threads=4) |
| Estimate point normals with OpenMP. More... | |
| template<typename PointCloud , typename KdTree > | |
| void | small_gicp::estimate_normals_omp (PointCloud &cloud, KdTree &kdtree, int num_neighbors=20, int num_threads=4) |
| Estimate point normals with OpenMP. More... | |
| template<typename PointCloud > | |
| void | small_gicp::estimate_covariances_omp (PointCloud &cloud, int num_neighbors=20, int num_threads=4) |
| Estimate point covariances with OpenMP. More... | |
| template<typename PointCloud , typename KdTree > | |
| void | small_gicp::estimate_covariances_omp (PointCloud &cloud, KdTree &kdtree, int num_neighbors=20, int num_threads=4) |
| Estimate point covariances with OpenMP. More... | |
| template<typename PointCloud > | |
| void | small_gicp::estimate_normals_covariances_omp (PointCloud &cloud, int num_neighbors=20, int num_threads=4) |
| Estimate point normals and covariances with OpenMP. More... | |
| template<typename PointCloud , typename KdTree > | |
| void | small_gicp::estimate_normals_covariances_omp (PointCloud &cloud, KdTree &kdtree, int num_neighbors=20, int num_threads=4) |
| Estimate point normals and covariances with OpenMP. More... | |