Global mapping-related callbacks. More...
#include <callbacks.hpp>
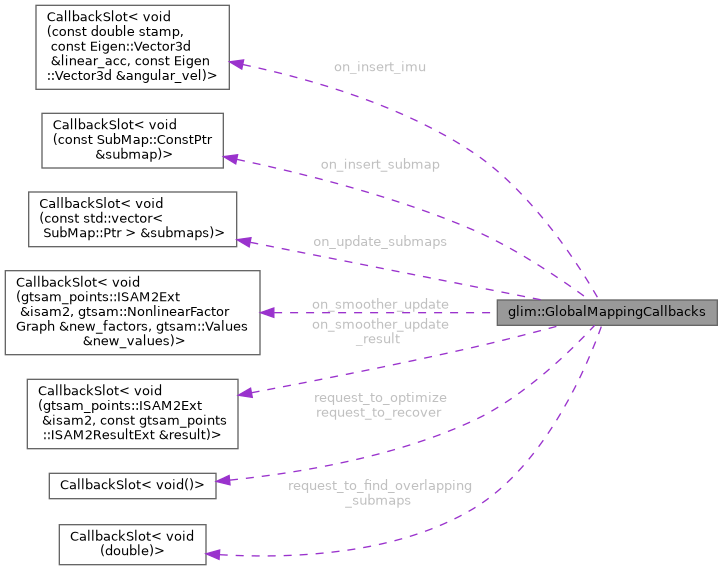
Collaboration diagram for glim::GlobalMappingCallbacks:
Static Public Attributes | |
| static CallbackSlot< void(const double stamp, const Eigen::Vector3d &linear_acc, const Eigen::Vector3d &angular_vel)> | on_insert_imu |
| IMU input callback. | |
| static CallbackSlot< void(const SubMap::ConstPtr &submap)> | on_insert_submap |
| SubMap input callback. | |
| static CallbackSlot< void(const std::vector< SubMap::Ptr > &submaps)> | on_update_submaps |
| SubMap states update callback. | |
| static CallbackSlot< void(gtsam_points::ISAM2Ext &isam2, gtsam::NonlinearFactorGraph &new_factors, gtsam::Values &new_values)> | on_smoother_update |
| Global optimization callback (just before optimization) | |
| static CallbackSlot< void(gtsam_points::ISAM2Ext &isam2, const gtsam_points::ISAM2ResultExt &result)> | on_smoother_update_result |
| Global optimization result callback (just after optimization) | |
| static CallbackSlot< void()> | request_to_optimize |
| Request the global mapping module to perform optimization. | |
| static CallbackSlot< void()> | request_to_recover |
| Request the global mapping module to detect and recover from a graph corruption. | |
| static CallbackSlot< void(double)> | request_to_find_overlapping_submaps |
| Request the global mapping module to find new overlapping submaps. | |
Detailed Description
Global mapping-related callbacks.
Member Data Documentation
◆ on_insert_imu
|
static |
IMU input callback.
- Parameters
-
stamp Timestamp linear_acc Linear acceleration angular_vel Angular velocity
◆ on_insert_submap
|
static |
◆ on_smoother_update
|
static |
Global optimization callback (just before optimization)
- Parameters
-
isam2 iSAM2 Optimizer new_factors New factors to be inserted into the factor graph new_values New values to be inserted into the factor graph
◆ on_smoother_update_result
|
static |
Global optimization result callback (just after optimization)
- Parameters
-
isam2 iSAM2 optimizer result iSAM2 result
◆ on_update_submaps
|
static |
SubMap states update callback.
- Parameters
-
submaps Updated submaps
- Note
- submap->T_world_origin are updated in the global mapping thread Accessing them from another thread is not thread-safe
◆ request_to_find_overlapping_submaps
|
static |
Request the global mapping module to find new overlapping submaps.
- Parameters
-
min_overlap Minimum overlap rate between submaps
- Note
- This is a special inverse-direction callback slot
◆ request_to_optimize
|
static |
Request the global mapping module to perform optimization.
- Note
- This is a special inverse-direction callback slot
◆ request_to_recover
|
static |
Request the global mapping module to detect and recover from a graph corruption.
- Note
- This is a special inverse-direction callback slot
The documentation for this struct was generated from the following file:
- /home/runner/work/glim/glim/include/glim/mapping/callbacks.hpp