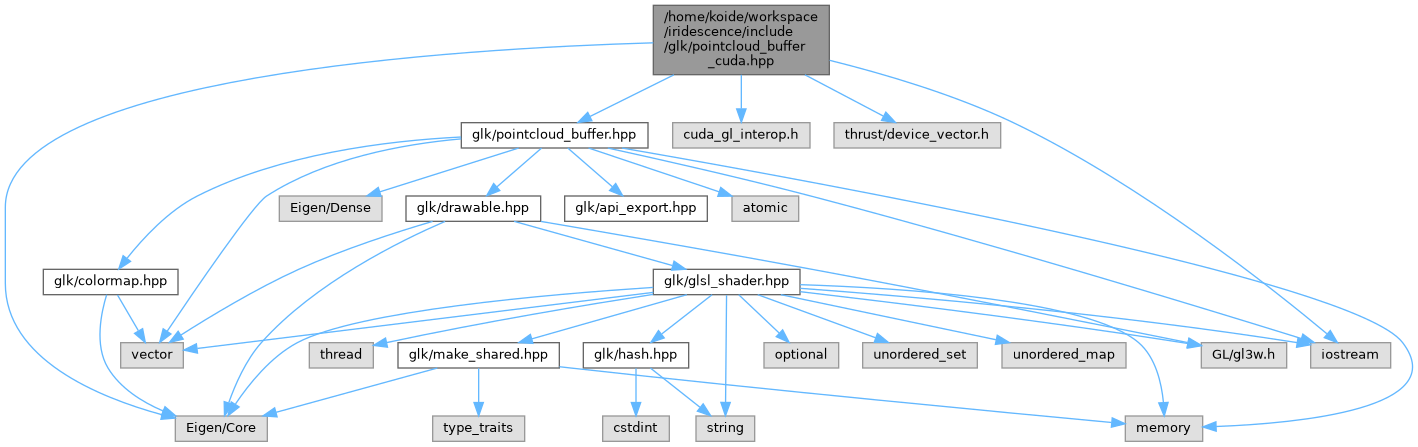
#include <iostream>#include <Eigen/Core>#include <cuda_gl_interop.h>#include <thrust/device_vector.h>#include <glk/pointcloud_buffer.hpp>
Include dependency graph for pointcloud_buffer_cuda.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | glk |
Functions | |
| static std::shared_ptr< PointCloudBuffer > | glk::create_point_cloud_buffer (const void *src_cuda_ptr, int stride, int num_points) |
| static std::shared_ptr< PointCloudBuffer > | glk::create_point_cloud_buffer (const thrust::device_vector< Eigen::Vector3f > &points) |