Incremental voxelmap with online covariance and normal estimation. More...
#include <incremental_covariance_voxelmap.hpp>

Public Member Functions | |
| IncrementalCovarianceVoxelMap (double voxel_resolution) | |
| Constructor. | |
| void | set_num_neighbors (int num_neighbors) |
| Set the number of neighbors for covariance estimation. | |
| void | set_min_num_neighbors (int min_num_neighbors) |
| Set the minimum number of neighbors for covariance estimation. | |
| void | set_warmup_cycles (int warmup_cycles) |
| Set the number of warmup cycles. Covariances of new points in this period are not re-evaluated every frame. | |
| void | set_lowrate_cycles (int lowrate_cycles) |
| Set the number of lowrate update cycles. Covariances of invalid points are re-evaluated every this period. | |
| void | set_remove_invalid_age_thresh (int remove_invalid_age_thresh) |
| Set the age threshold for removing invalid points. Invalid points older than this are removed. | |
| void | set_eig_stddev_thresh_scale (double eig_stddev_thresh_scale) |
| Set the threshold scale for normal validation. | |
| void | set_num_threads (int num_threads) |
| Set the number of threads for normal estimation. | |
| virtual void | clear () override |
| Clear the voxelmap. | |
| virtual void | insert (const PointCloud &points) override |
| Insert point into the voxelmap. | |
| virtual size_t | knn_search (const double *pt, size_t k, size_t *k_indices, double *k_sq_dists, double max_sq_dist=std::numeric_limits< double >::max()) const override |
| Find k-nearest neighbors. This only finds neighbors with valid covariances. | |
| size_t | knn_search_force (const double *pt, size_t k, size_t *k_indices, double *k_sq_dists, double max_sq_dist=std::numeric_limits< double >::max()) const |
| Find k-nearest neighbors. This finds neighbors regardless of the validity of covariances. | |
| std::vector< size_t > | valid_indices (int num_threads=-1) const |
| Get valid point indices. If num_threads is -1, the member variable num_threads is used. | |
| std::vector< Eigen::Vector4d > | voxel_points (const std::vector< size_t > &indices) const |
| Get points from indices. | |
| std::vector< Eigen::Vector4d > | voxel_normals (const std::vector< size_t > &indices) const |
| Get normals from indices. | |
| std::vector< Eigen::Matrix4d > | voxel_covs (const std::vector< size_t > &indices) const |
| Get covariances from indices. | |
| virtual std::vector< Eigen::Vector4d > | voxel_points () const override |
| Get voxel points. | |
| virtual std::vector< Eigen::Vector4d > | voxel_normals () const override |
| Get voxel normals. | |
| virtual std::vector< Eigen::Matrix4d > | voxel_covs () const override |
| Get voxel covariances. | |
 Public Member Functions inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > Public Member Functions inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > | |
| IncrementalVoxelMap (double leaf_size) | |
| Constructor. | |
| void | set_voxel_resolution (const double leaf_size) |
| Voxel resolution. | |
| void | set_lru_clear_cycle (const int lru_clear_cycle) |
| LRU cache clearing cycle. | |
| void | set_lru_horizon (const int lru_horizon) |
| LRU cache horizon. | |
| void | set_neighbor_voxel_mode (const int mode) |
| Neighboring voxel search mode (1, 7, 19, or 27). | |
| VoxelContents::Setting & | voxel_insertion_setting () |
| Voxel setting. | |
| double | leaf_size () const |
| Voxel size. | |
| size_t | num_voxels () const |
| Number of voxels in the voxelmap. | |
| size_t | calc_index (const size_t voxel_id, const size_t point_id) const |
| Calculate the global point index from the voxel index and the point index. | |
| size_t | voxel_id (const size_t i) const |
| Extract the point ID from a global index. | |
| size_t | point_id (const size_t i) const |
| Extract the voxel ID from a global index. | |
| bool | has_points () const |
| bool | has_normals () const |
| bool | has_covs () const |
| bool | has_intensities () const |
| decltype(auto) | point (const size_t i) const |
| decltype(auto) | normal (const size_t i) const |
| decltype(auto) | cov (const size_t i) const |
| decltype(auto) | intensity (const size_t i) const |
| virtual std::vector< double > | voxel_intensities () const |
| virtual PointCloudCPU::Ptr | voxel_data () const |
| Public Member Functions inherited from gtsam_points::NearestNeighborSearch | |
| virtual size_t | radius_search (const double *pt, double radius, std::vector< size_t > &indices, std::vector< double > &sq_dists, int max_num_neighbors=std::numeric_limits< int >::max()) const |
| Radius search. | |
Protected Attributes | |
| int | num_neighbors |
| Number of neighbors for covariance estimation. | |
| int | min_num_neighbors |
| Minimum number of neighbors for covariance estimation. | |
| int | warmup_cycles |
| Number of cycles for covariance warmup. | |
| int | lowrate_cycles |
| Number of cycles for lowrate covariance estimation. | |
| int | remove_invalid_age_thresh |
| Age threshold for removing invalid points. | |
| double | eig_stddev_thresh_scale |
| Threshold scale for normal validation. | |
| int | num_threads |
| Number of threads for normal estimation. | |
| std::deque< RunningStatistics< Eigen::Array3d > > | eig_stats |
| Running statistics for eigenvalues. | |
| Protected Attributes inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > | |
| double | inv_leaf_size |
| Inverse of the voxel size. | |
| std::vector< Eigen::Vector3i > | offsets |
| Neighbor voxel offsets. | |
| size_t | lru_horizon |
| LRU horizon size. Voxels that have not been accessed for lru_horizon steps are deleted. | |
| size_t | lru_clear_cycle |
| LRU clear cycle. Voxel deletion is performed every lru_clear_cycle steps. | |
| size_t | lru_counter |
| LRU counter. Incremented every step. | |
| VoxelContents::Setting | voxel_setting |
| Voxel setting. | |
| std::vector< std::shared_ptr< std::pair< VoxelInfo, IncrementalCovarianceContainer > > > | flat_voxels |
| Voxel contents. | |
| std::unordered_map< Eigen::Vector3i, size_t, XORVector3iHash > | voxels |
| Voxel index map. | |
Additional Inherited Members | |
| Public Types inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > | |
| using | Ptr = std::shared_ptr< IncrementalVoxelMap > |
| using | ConstPtr = std::shared_ptr< const IncrementalVoxelMap > |
| Public Types inherited from gtsam_points::NearestNeighborSearch | |
| using | Ptr = std::shared_ptr< NearestNeighborSearch > |
| using | ConstPtr = std::shared_ptr< const NearestNeighborSearch > |
| Protected Member Functions inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > | |
| std::vector< Eigen::Vector3i > | neighbor_offsets (const int neighbor_voxel_mode) const |
| void | visit_points (const Func &f) const |
| Static Protected Attributes inherited from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer > | |
| static constexpr int | point_id_bits |
| Use the first 32 bits for point id. | |
| static constexpr int | voxel_id_bits |
| Use the remaining bits for voxel id. | |
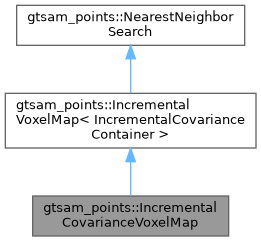
Detailed Description
Incremental voxelmap with online covariance and normal estimation.
Constructor & Destructor Documentation
◆ IncrementalCovarianceVoxelMap()
| gtsam_points::IncrementalCovarianceVoxelMap::IncrementalCovarianceVoxelMap | ( | double | voxel_resolution | ) |
Constructor.
- Parameters
-
voxel_resolution Voxel resolution
Member Function Documentation
◆ clear()
|
overridevirtual |
Clear the voxelmap.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
◆ insert()
|
overridevirtual |
Insert point into the voxelmap.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
◆ knn_search()
|
overridevirtual |
Find k-nearest neighbors. This only finds neighbors with valid covariances.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
◆ voxel_covs()
|
overridevirtual |
Get voxel covariances.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
◆ voxel_normals()
|
overridevirtual |
Get voxel normals.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
◆ voxel_points()
|
overridevirtual |
Get voxel points.
Reimplemented from gtsam_points::IncrementalVoxelMap< IncrementalCovarianceContainer >.
The documentation for this struct was generated from the following file:
- /home/runner/work/gtsam_points/gtsam_points/include/gtsam_points/ann/incremental_covariance_voxelmap.hpp