Point cloud registration. More...
#include <registration.hpp>
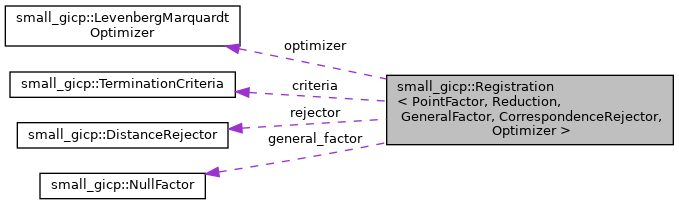
Collaboration diagram for small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >:
Public Types | |
| using | PointFactorSetting = typename PointFactor::Setting |
Public Member Functions | |
| template<typename TargetPointCloud , typename SourcePointCloud , typename TargetTree > | |
| RegistrationResult | align (const TargetPointCloud &target, const SourcePointCloud &source, const TargetTree &target_tree, const Eigen::Isometry3d &init_T=Eigen::Isometry3d::Identity()) const |
| Align point clouds. More... | |
Public Attributes | |
| TerminationCriteria | criteria |
| Termination criteria. More... | |
| CorrespondenceRejector | rejector |
| Correspondence rejector. More... | |
| PointFactorSetting | point_factor |
| Factor setting. More... | |
| GeneralFactor | general_factor |
| General factor. More... | |
| Reduction | reduction |
| Reduction. More... | |
| Optimizer | optimizer |
| Optimizer. More... | |
Detailed Description
template<typename PointFactor, typename Reduction, typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
struct small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >
Point cloud registration.
Member Typedef Documentation
◆ PointFactorSetting
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| using small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::PointFactorSetting = typename PointFactor::Setting |
Member Function Documentation
◆ align()
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
template<typename TargetPointCloud , typename SourcePointCloud , typename TargetTree >
|
inline |
Align point clouds.
- Parameters
-
target Target point cloud source Source point cloud target_tree Nearest neighbor search for the target point cloud init_T Initial guess
- Returns
- Registration result
Member Data Documentation
◆ criteria
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| TerminationCriteria small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::criteria |
Termination criteria.
◆ general_factor
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| GeneralFactor small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::general_factor |
General factor.
◆ optimizer
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| Optimizer small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::optimizer |
Optimizer.
◆ point_factor
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| PointFactorSetting small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::point_factor |
Factor setting.
◆ reduction
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| Reduction small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::reduction |
Reduction.
◆ rejector
template<typename PointFactor , typename Reduction , typename GeneralFactor = NullFactor, typename CorrespondenceRejector = DistanceRejector, typename Optimizer = LevenbergMarquardtOptimizer>
| CorrespondenceRejector small_gicp::Registration< PointFactor, Reduction, GeneralFactor, CorrespondenceRejector, Optimizer >::rejector |
Correspondence rejector.
The documentation for this struct was generated from the following file:
- /home/runner/work/small_gicp/small_gicp/include/small_gicp/registration/registration.hpp